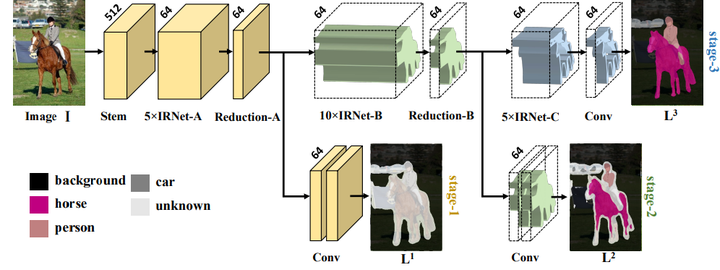
We propose a novel deep layer cascade (LC) method to improve the accuracy and speed of semantic segmentation. Unlike the conventional model cascade (MC) that is composed of multiple independent models, LC treats a single deep model as a cascade of several sub-models. Earlier sub-models are trained to handle easy and confident regions, and they progressively feed-forward harder regions to the next sub-model for processing. Convolutions are only calculated on these regions to reduce computations. The proposed method possesses several advantages. First, LC classifies most of the easy regions in the shallow stage and makes deeper stage focuses on a few hard regions. Such an adaptive and ‘difficulty-aware’ learning improves segmentation performance. Second, LC accelerates both training and testing of deep network thanks to early decisions in the shallow stage. Third, in comparison to MC, LC is an end-to-end trainable framework, allowing joint learning of all sub-models. We evaluate our method on PASCAL VOC and Cityscapes datasets, achieving state-of-the-art performance and fast speed.

Demo:
Ping Luo
Associate Professor, Computer Science, The University of Hong Kong
My research interests include deep learning, computer vision, and artificial intelligence.